3D SCAN 비젼 시스템
| 특징 |
· 빔모듈과 산업용 카메라를 이용한 구조광 방식의 정밀급 3D스캔비젼 시스템 · 획기적인 노이즈 제거 기술 · 편리한 User-Interface 기능 · 설정적용의 간편성, 안정적 패턴 매칭 (Patmax) | |
| 3D SCAN 센서의 응용 분야 |
· 대상물의 3D 패턴매칭 · 대상물의 품질검사 (치수 및 형상불량검사) · 대상물의 사양검사 : 차량루프 사양검사, 테일게이트 사양 검사 · 3D 위치보정시스템 : 차량 글라스 장착 시스템 , 타이어 장착 시스템 | |
| 측정 원리 |

| |
LAY OUT
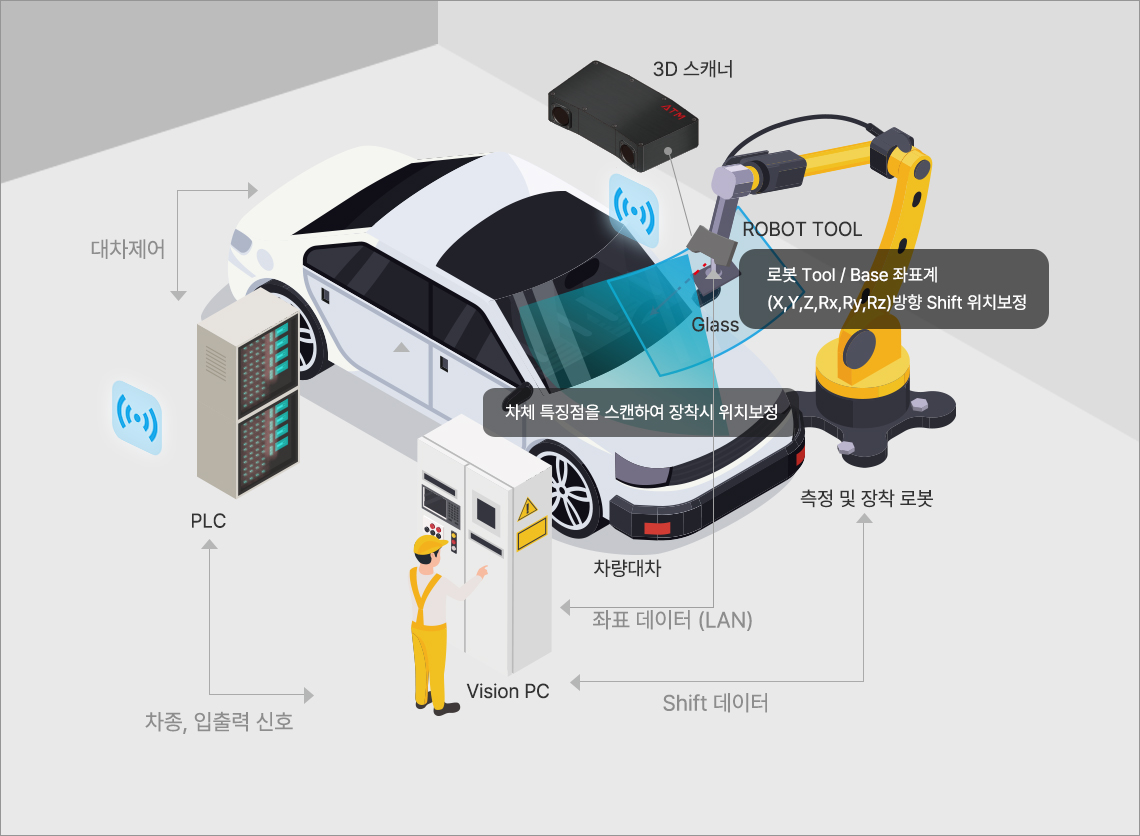
3D 스캔 위치보정 비젼 시스템
· 매칭 알고리즘을 적용하여 기준차량 대비 이동량 (Δx, Δy, Δz, ΔRx, ΔRy, ΔRz) 을 계산
· 산업용 로봇으로 계산된 이동량을 전송하여 오프셋으로 적용 후 장착
· 차량프레임 세군데이상 스캔하여 하나의 포인터 클라우드로 병합하는 기술 적용
· 장착될 차제 위치가 기울어지거나 회전이 발생한 경우에도 오차율이 낮고 이동량 계산이 월등히 우수함.
· 3D SCAN 측정시 2D 비젼에 비해 위치 보정률 우수
3D 스캔 위치보정 비젼 시스템 적용사례
· AITZ 3D 글라스 장착 시스템 : 3D 영역 스캔 센서로 글라스가 장착될 차체 프레임을 측정하여 포인트 클라우드 데이터를 추출
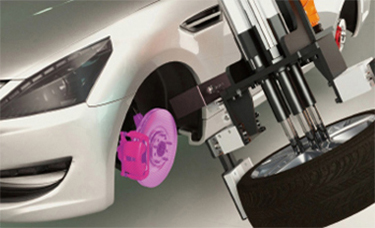
· AITZ 3D 타이어 체결 시스템 : 3D 영역 스캔 센서로 타이어가 장착 될 휠 허브를 측정하여 포인트 클라우드 데이터를 추출
3D 스캔 위치보정 절차
 |
마스트 생성 |
 |
장작 위치 SCAN |
 |
ICP 매칭 수행 |
|
기준위치 대비 이동량 계산기준위치 대비 이동량 계산 (△X,△Y,△Z,△Rx,△Ry,△Rz) |
|
위치 편차 로봇으로 전송위치 편차 로봇으로 전송 |
|
장착 절차 |
마스트 생성
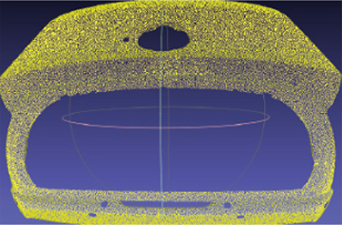
마스트 생성
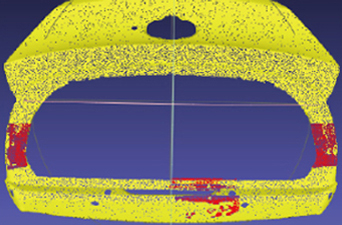
스캔데이터와 마스트를 겹친 영상
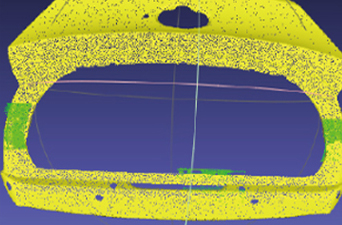
ICP매칭 후의 영상
(이동량 계산)
통신예시

3D 스캔 사양검사 비젼 시스템
· 2D 비젼으로는 불가능한 사양검사를 3D 비젼으로 구현
· 하나의 공정에서 다차종 대응 가능
· 루프 2개소를측정하여 하나의 포인터 클라우드데이터로 병합하는기술 적용
3D 스캔 사양검사 비젼 시스템 적용사례
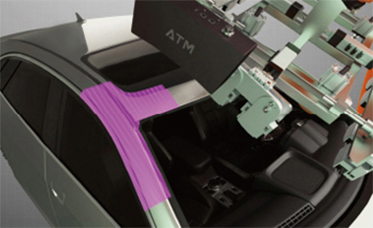
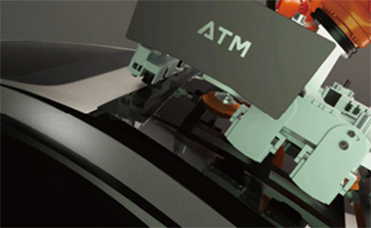
· AITZ 3D 루프 사양 검사 시스템 : 3D 영역 스캔 센서로 차량 루프 곡률을 감지하여 사양을 검사
· AITZ 3D 테일 게이트 사양 검사 시스템 : 동일한 차종에서 국가별 차량 번호
3D 스캔 사양검사 절차
|
마스트 생성 |
|
3D SCAN |
|
ICP 매칭 수행 |
|
곡률맵 추출 및 특징홀 감지 곡률맵 추출 및 특징홀 감지 or Fitness와 오버랩 계산 |
|
사양 판별 |
|
장착 절차 |
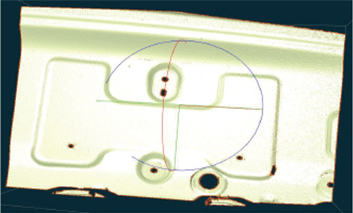
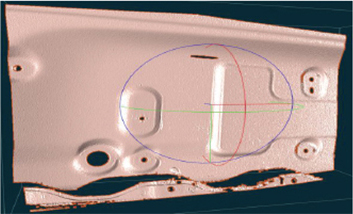
3D SCAN 영상
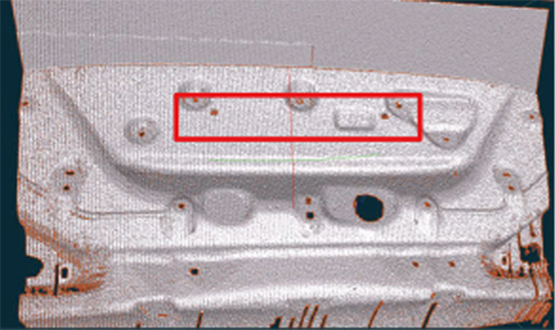
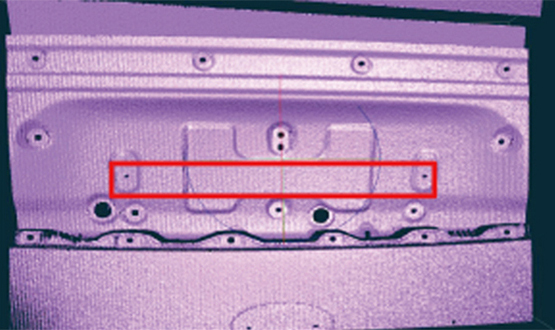
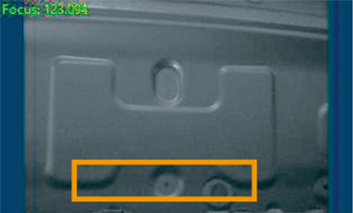
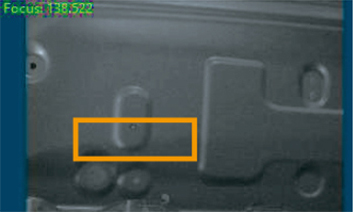
3D SCAN 홀 감지 영상
 |
 |
 |
 |
 |
|
 |
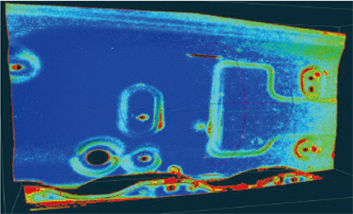 |
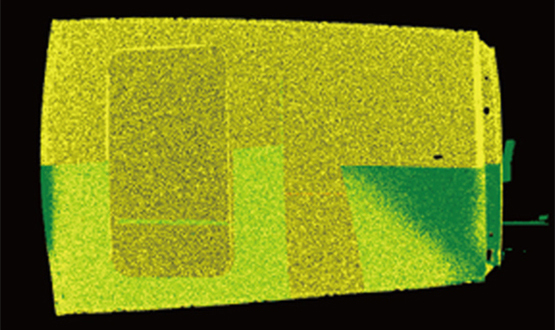
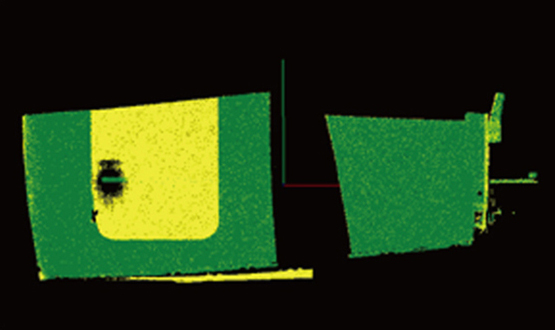
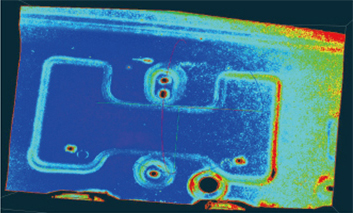
| * 곡률 맵(Curvature map) : 센서에서 가까운 거리에 있으면 blue, 멀어질수록 green, red 순으로 표시 | |||