AITZ 글라스 장착 비젼 시스템
AITZ 글라스 장착 비젼 시스템은 ATM 만의 기술력을 통해 자체 개발한 AITZ 3Ds 와 AITZ LZ, AITZ 비젼 소프트웨어를
결합한 시스템으로 기존 글라스 장착 비젼 시스템에 비해 완성도 및 오차범위를 혁신적으로 보완한 획기적인 시스템입니다.
차체 바디의 편차를 정확하게 측정하여 정위치에 글라스를 장착할 뿐만 아니라 차량 바디의 변형, 글라스 곡률의 변화, 흡착시 쏠림 등
기타 환경적인 이유로 정상 장착 상태에 아니어도 장착전 재보정을 통해 글라스를 정위치에 장착하도록 하여 줍니다.
특징
- AITZ 3Ds를 통해 정확하고 빠른 바디편차 측정(소요시간 :1초내외)
- AITZ LZ를 통해 최종 위치편차 세부 보정(소요시간 : 2초 내외)
- 3D 스캔 영역 일부 간섭 및 차량의 변형 등 불량 사양에도 정상 측정 가능
- 일부 외란 의 간섭 및 외부조명의 영향 없이 정상측정 가능
- 3D 스캔 후 차량의 위치 변화 및 기타 영향으로 인해 글라스 장착 위치가 틀어진 경우에도 AITZ LZ 측정을 통해 최종 차량의 정위치에 균형 장착 가능

AITZ 3Ds
| - | 빔모듈과 산업용 카메라를 이용한 구조광 방식의 초정밀급 3D스캔 비젼 센서 |
| - | 스캔속도 0.2s, 데이터처리속도 0.5s의 초고속 처리능력 |
| - | 자동화 공정의 제품 위치 측정 및 보정에 최적화 |

AITZ LZ
| - | 높이, 경사, 갭, 형상 측정 등 다양한 공정에 맞춤 활용 가능 |
| - | 어두운 공간에서도 객체 식별이 가능하고 컬러의 영향을 최소화 함 |

AITZ 비젼 소프트웨어
| - | 자사 알고리즘 기반 프로그램 |
| - | 편리한 User-Interface |
| - | I/O와 통신을 통해 연결성 최적화 |
LAY-OUT
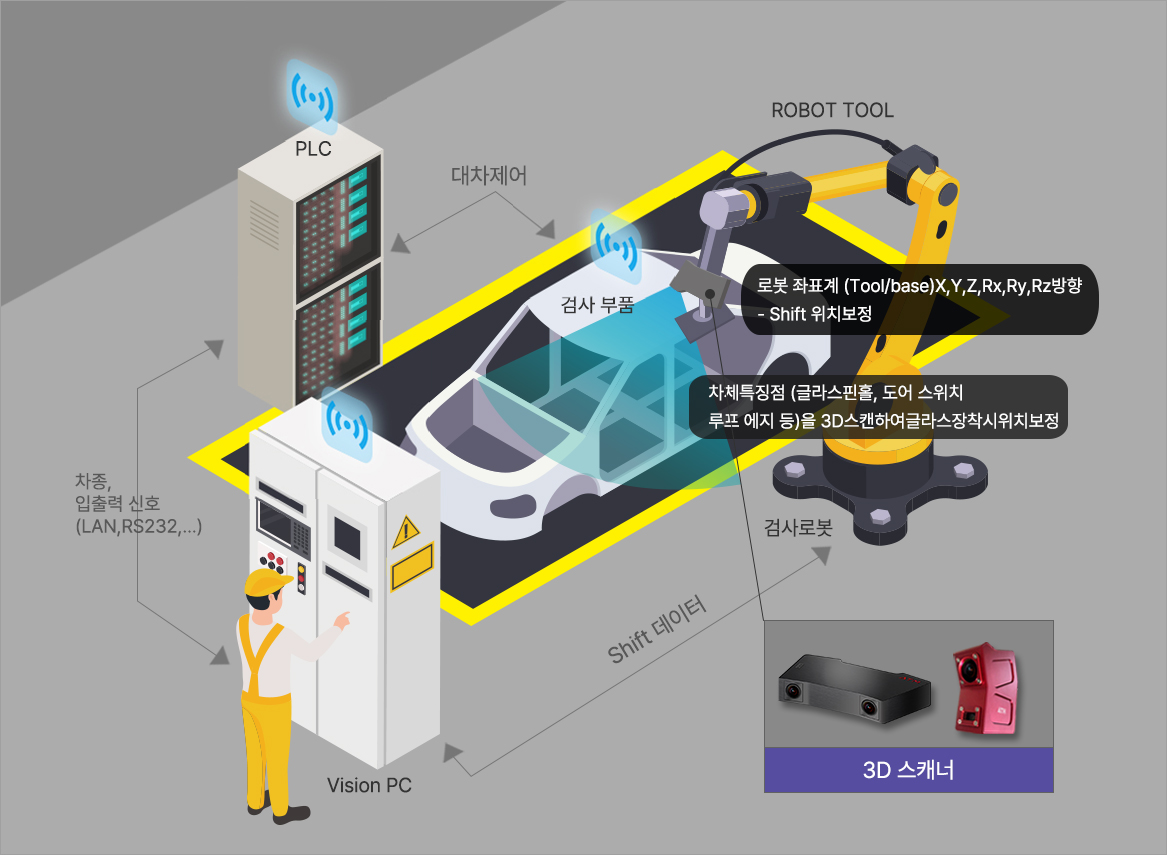
AITZ 글라스 장착 절차
AITZ 3Ds 스캔을 통해 바디 편차 측정

마스트 3D 데이터(3D 스캔 센서로 취득)
스캔 데이터 + 마스트 데이터
매칭 결과 (△X,△Y,△Z,△Rx,△Ry,△Rz )산출
글라스 장착 위치로 이동

최종 장착 전 AITZ LZ를 통한 세부 측정을 통해 위치 변화에 대응
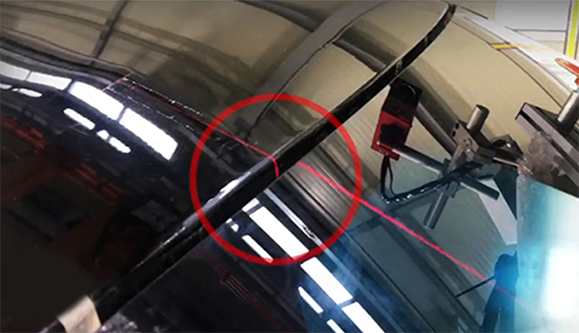
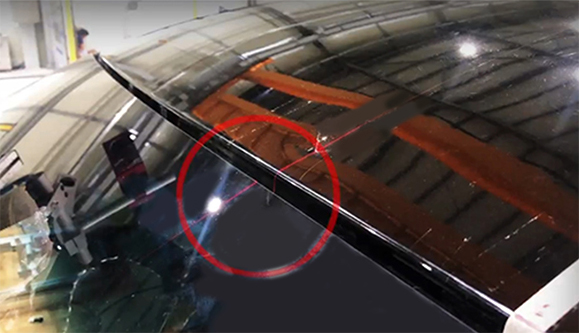



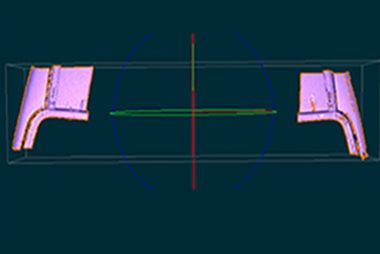
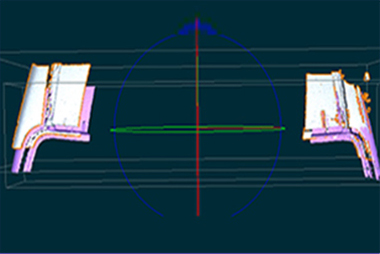
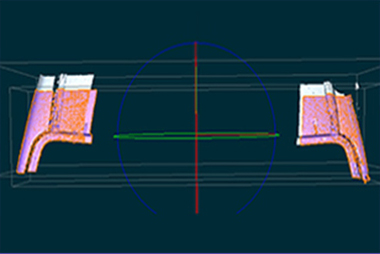
측정영상
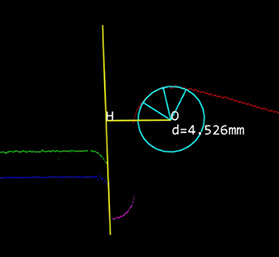
알고리즘 적용영상
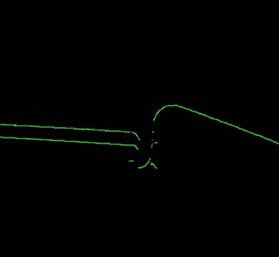
알고리즘 적용영상
알고리즘 적용영상